Phát triển là quá trình đẩy mạnh không chỉ về sức mạnh mà còn cần phải đảm bảo an toàn. Trong bài viết hôm nay, OKXE sẽ giúp các bạn tìm hiểu về thiết bị IMU!
Tổng quan về IMU
IMU là gì?
IMU là viết tắt của Inertial Measurement Unit. Đây là thiết bị kết hợp giữa cảm biến Gyroscope còn gọi là cảm biến con quay hồi chuyển. Và cảm biến Accelerometer còn gọi là cảm biến gia tốc. Thiết bị này có chức năng là cung cấp thông tin về độ nghiêng và góc quay. Để giúp hệ thống cân bằng một cách tự động.
Để có thể nắm rõ được nguyên tắc hoạt động của IMU, các bạn cần tìm hiểu kỹ về nguyên tắc hoạt động của từng bộ phận Acc và Gyro. Cụ thể, Acc thường có 3 trục xyz tương ứng với 3 chiều không gian. Do đo được cả gia tốc trọng lực nên tại giá trị thực sẽ bao gồm cả trọng lực.
Trong khi đó, Gyro cũng có 3 trục xyz giống như Acc. Ví dụ khi bạn để IMU thắng đứng và để im, giá trị trả về cho bạn sẽ là Acc = [0.0, -9.8, 0.0] và Gyro = [0.0, 0.0, 0.0] do lúc này chỉ có lực hút của Trái Đất tác động lên và không có chuyển động nào. Thêm nữa, do Gyro chỉ đo tốc độ quay chứ không đo góc quay nên nếu bạn quay 1 góc nào đó sau đó dừng lại thì giá trị của Gyro sẽ tăng lên rồi hạ về 0.
Ứng dụng của IMU
Chắc hẳn các bạn đã hình dung ra một chiếc điện thoại smartphone sử dụng thiết bị IMU như thế nào rồi đúng không? Tuy nhiên, những ứng dụng của công nghệ IMU không chỉ dừng lại ở đó. Có rất nhiều thiết bị được trang bị IMU để nhằm định hướng chuyển động, kiểm soát cân bằng. Các ứng dụng có thể kể đến như: robot 2 bánh tự cân bằng, tay cầm chơi game, máy bay điều khiển từ xa – drone, hệ thống giữ thăng bằng cho máy ảnh/camera, đếm số bước chân, cảm biến rơi…

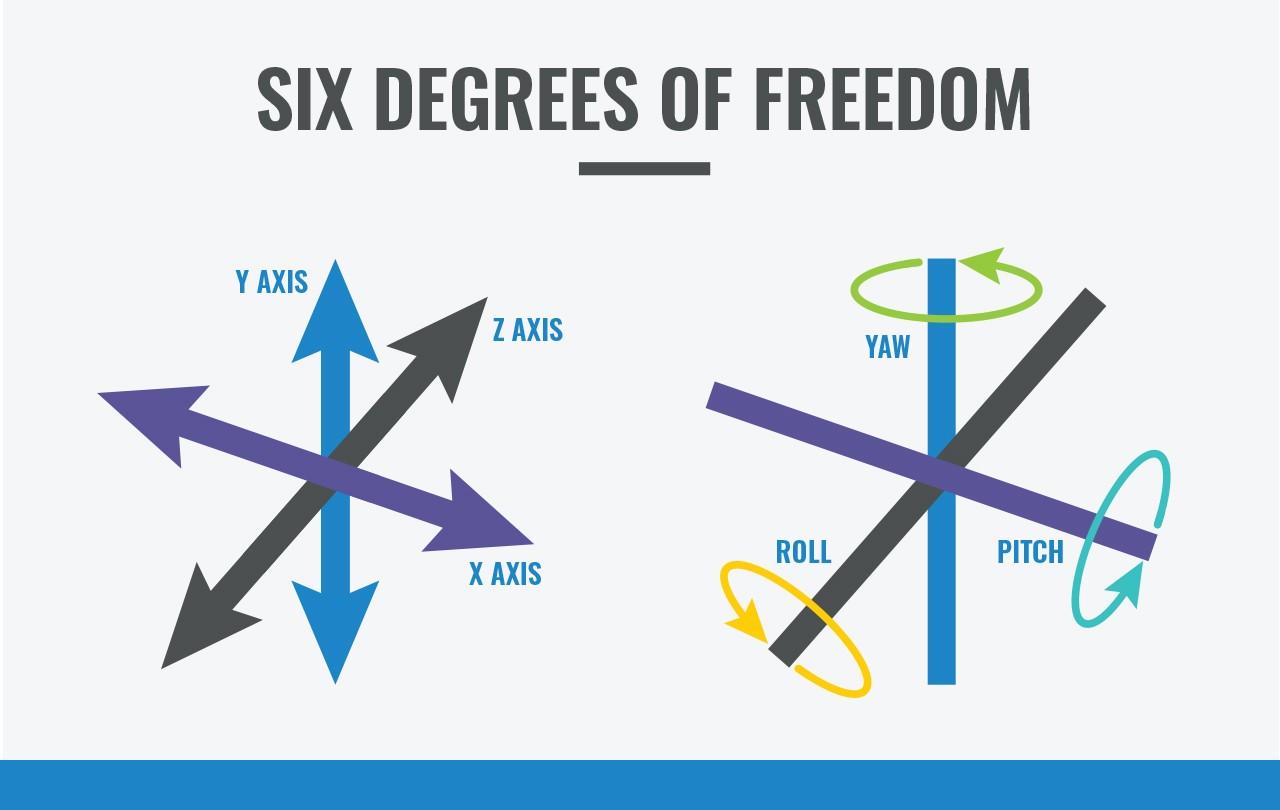
Như đã nói ở trên, một IMU thông thường sẽ có 6 trục (Degrees Of Freedom – DOF). Tuy nhiên, đối với những thiết bị phức tạp hơn như robot, máy bay điều khiển từ xa… thì IMU sẽ có 9 trục – tăng thêm 3 trục cảm biến từ trường Magnetometer hay 10 trục – tăng thêm 1 áp kế Barometer hay 11 trục – tăng thêm module GPS nhằm định vị.
Những lỗi thường gặp
Giống như những cảm biến khác, IMU cũng có những lỗi nhất định mỗi khi sử dụng. Cụ thể:
- Accelerometer: Theo tìm hiểu, Acc luôn có offset ở trên mỗi trục. Chính điều này đã khiến giá trị đo được thường bị lệch đi so với thực tế. Ngoài ra, giá trị này thường khá nhiễu dẫn đến tình trạng đọc trở nên khó khăn hơn.
- Gyroscope: Giống Acc, Gyro cũng có offset là bias có thể khiến các giá trị đo bị giảm. Thêm một vấn đề nữa ở Gyro đó chính là drift. Nghĩa là bias có thể thay đổi chậm theo thời gian. Tuy nhiên, Gyro có ưu thế hơn ở việc ít bị nhiễu hơn Acc.
Vậy làm sao để khắc phục? Với những offset là hằng số thì đơn giản là các bạn đo lại giá trị đó rồi trừ vào giá trị đo ban đầu. Đối với những tín hiệu bị nhiễu, các bạn có thể dùng bộ lọc điện tử tần số thấp. Trong khi đó, đối với vấn đề drift của Gyro. Thì các bạn có thể dùng bộ lọc cao tần bởi Gyro drift khá chậm.
Một cách khắc phục chuyên nghiệp hơn, các bạn có thể sử dụng sensor fusion. Nghĩa là các bạn dùng cả Acc và Gyro để đo góc sau đó dùng một số thuật toán để gộp hai giá trị lại với nhau, bù trừ cho nhau đồng thời đưa ra kết quả chính xác nhất.
Thiết bị IMU trên xe mô tô là gì?
IMU có thể nói là thiết bị đắt nhất được trang bị trên xe mô tô hiện nay. Thiết bị này được trang bị nhằm phát hiện các chuyển động cũng như hướng chuyển động của xe mỗi khi chạy. IMU sẽ đo hướng chuyển động bao gồm rẽ phải hoặc trái. Tăng tốc phía trước hoặc lùi về phía sau và từ trên xuống dưới.
IMU có nhiệm vụ làm việc cùng với những cảm biến được đặt xung quanh để từ đó nhận thông tin. Từ đó, IMU sẽ phân tích, nắm bắt những triệu chứng sau đó quản lý các hệ thống như hệ thống bướm ga, phanh… để có thể khắc phục mọi sự cố tự động chỉ trong một giây. Lúc này, IMU sẽ can thiệp để tăng lực hãm phanh hoặc nhả phanh, cắt công suất động cơ… để nhằm đưa chiếc xe trở lại trạng thái ổn định.
Trong hầu hết những trường hợp, IMU sẽ chịu trách chỉ huy khá nhiều hệ thống trên xe máy mà mọi người đã quen thuộc như hệ thống Cornering ABS hay hệ thống Kiểm soát lực kéo Traction Control… Lúc này, IMU sẽ làm nhiệm vụ xác định mức công suất động cơ phù hợp mỗi khi tốc độ quay giữa bánh trước và bánh sau có độ chênh lệch lớn.
IMU được ứng dụng trong Cornering ABS trên mô tô
Trong khi đó, nếu nó được lắp với hệ thống Wheelie Control thì sẽ giúp kiểm soát việc bốc đầu xe một cách vô tình bằng cách phát hiện sự nâng lên của bánh trước. Khi đó, hệ thống này sẽ ra lệnh để hãm công suất khiến hiện tượng này không xảy ra.
Trên đây là những thông tin về IMU. Có thể thấy rằng, IMU là một thiết bị khá thú vị với nhiều ứng dụng khác nhau. Việc sử dụng IMU như thế nào không hề khó nhưng để có thể sử dụng chúng một cách có hiệu quả thì sẽ đòi hỏi các bạn cần bỏ ra công sức để hiệu chỉnh.